이 카탈로그를 통해, 리드는 스크류의 한 회전당 움직이는 직선 거리로서의 스크류를 정의하는 용어로 사용될 것입니다.
더 큰 리드는 결국 스크류의 한 회전 당 움직이는 직선 거리를 더 크게 합니다. 리드는 = 피치 X 스크류 Start의 수를 말합니다.
각 나사선 간 축 거리를 말합니다.
피치는 싱글 Start 스크류의 리드와 동일합니다. 싱글 스크류에는 하나 이상의 나사선이 있는데 이를 Start라고 부릅니다.
다수의 Starts로 구성된 리드 스크류들이 동력 전달에 있어 일반적으로 더 안정적이고 효율적입니다.
주어진 스크류의 길이를 측정함으로써 지정됩니다.
예를 들어 인치/Foot당 0.004 인치의 경우
리드 스크류의 정밀도는 리드를 기준으로 이론적으로 이동할 수 있는 거리 대비 실제로 이동한 거리의 차이를 그 정확도로 계산하게 됩니다.
예를 들어 0.5 인치 리드 및 0.004 인치/foot 의 리드 정밀도를 가진 스크류가 24 번 회전할 경우 이론적으로 너트는 12인치를 이동해야 합니다.
그러나 0.004 인치/foot의 리드 정밀도를 가지는 경우 실제 이송 거리는 11.996 인치부터 12.004 인치까지 달라질 수 있습니다.
수직 방향의 시스템은 모터의 전원이 꺼지거나 브레이크가 장착되어 있지 않을 경우 뒤로 밀릴 수 있는 잠재적인 문제점을 가지고 있습니다.
또한 수직 방향의 시스템은 부하 / 토크를 계산하는데 필요한 추가적인 중력 요소를 가집니다.
하이브리드 스텝 모터의 공진은 펄스가 약 200PPS 정도 되었을 때 주로 발생합니다.
이 공진 구간 이상에서 가속을 하시기 바라며, 혹은 마이크로스텝핑 기능이 이 구간에서의 진동과 소음에 도움을 줄 수 있습니다.
스텝 모터들은 모터의 구동을 위해 외부 드라이브가 필요합니다. 이러한 것들에는 전형적으로 전원, 로직 변환기, 스위칭 부품 및 펄스 발생기 등이 필요합니다.
그러나 이런 기본적인 구성들은 상용화된 다양한 드라이브 제품에 모두 포함이 되어 있습니다.
기본적인 스텝 모터 드라이브들도 다양한 기능들을 탑재하여 제품 구동은 물론 높은 성능을 낼 수 있습니다. 딩스가 가지고 있는 다양한 드라이브 제품들을 검토하시기 바랍니다.
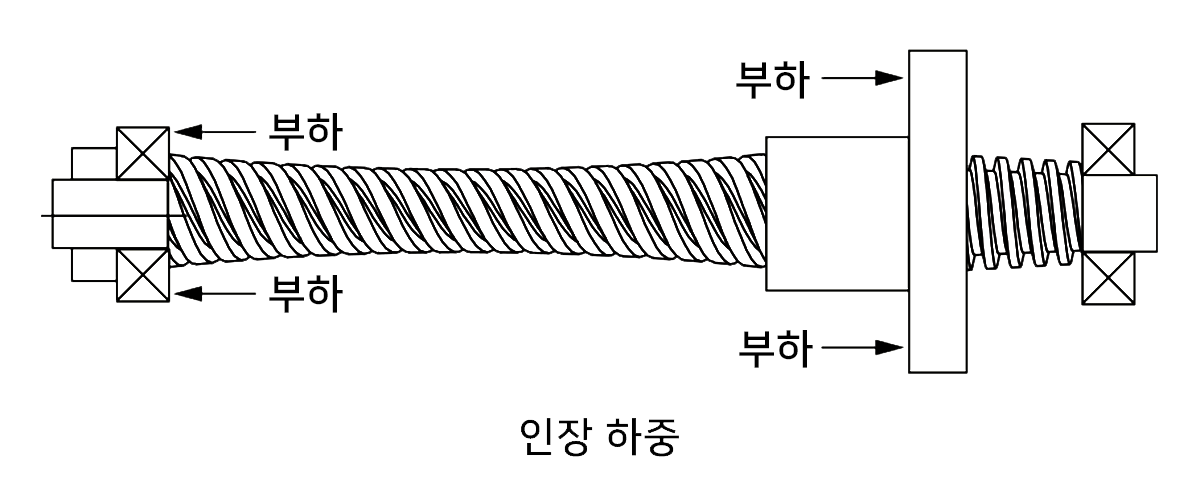
스크류가 늘어나려 하는 경향의 부하를 인장 하중이라고 합니다.
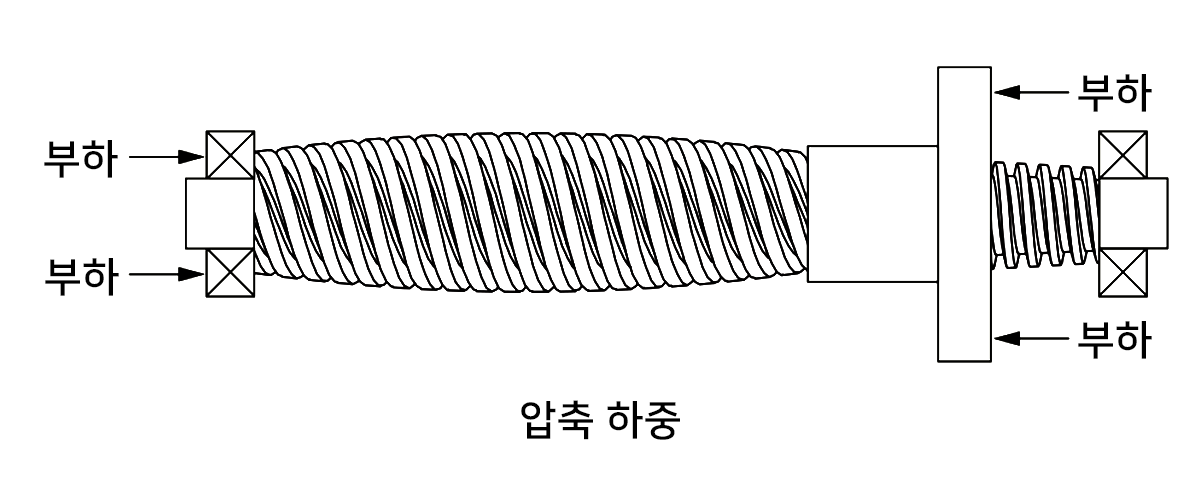
부하가 줄어들거나 압축되려 하는 스크류의 부하를 압축 하중이라고 합니다.
이는 부하의 크기에 따라 달라지며, 인장에 대한 스크류를 디자인할 때 열 하중 (Column Loading)대비 스크류의 축 강도를 활용합니다.
부하에 수직으로 가해지는 하중.
리니어 가이드와 같은 추가적인 기구 지지가 없을 경우 권장하지 않습니다.
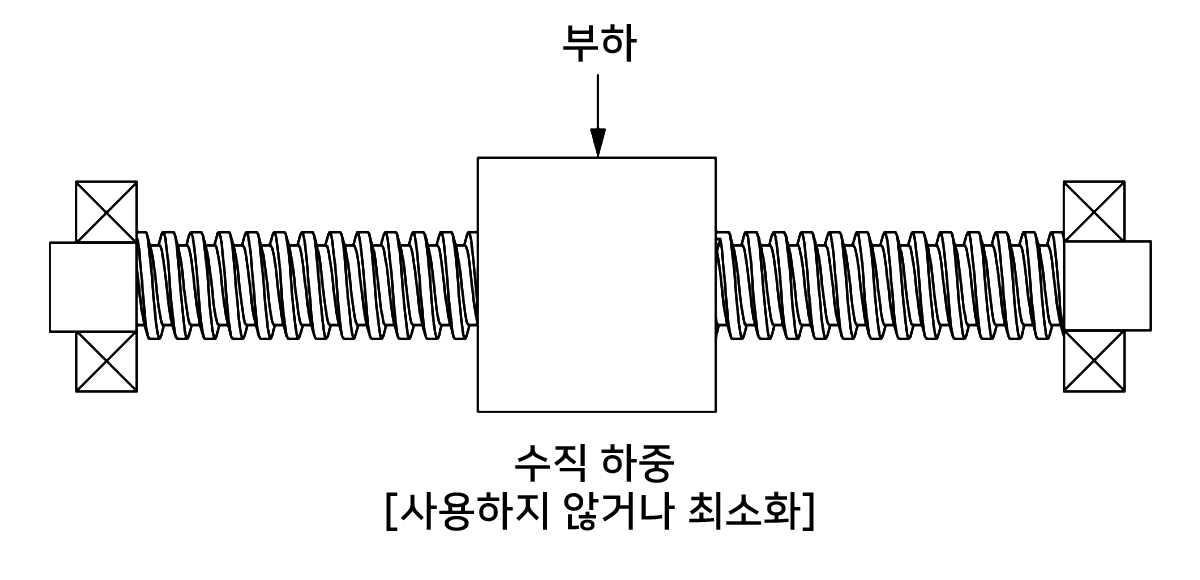
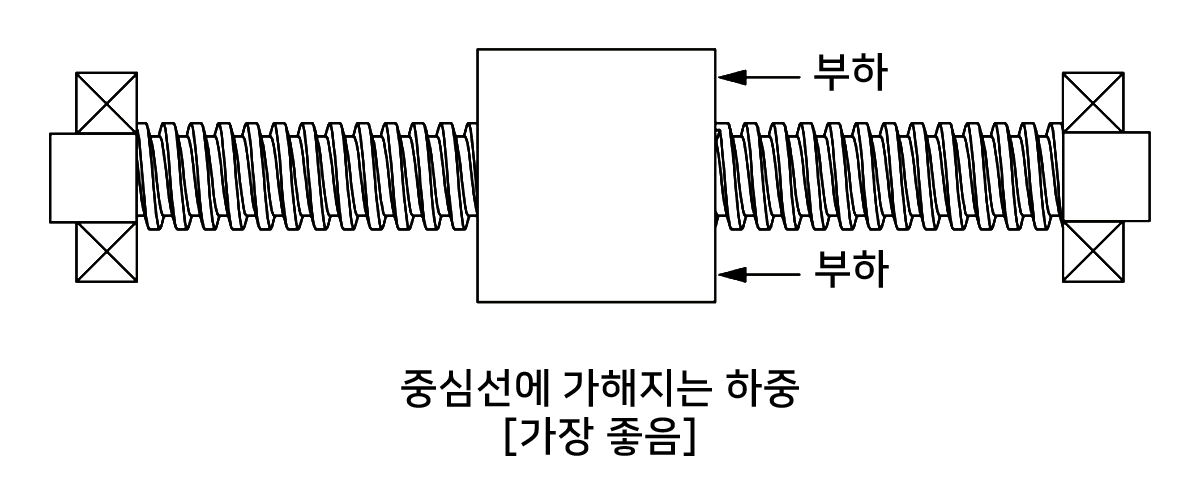
리드 스크류 중심선에 가해지는 하중.
Backdriving은 회전 운동을 만들기 위한 스크류나 너트에 축방향으로 가해지는 부하에 따른 결과입니다. 일반적으로 50% 이상의 효율성을 가진 리드 스크류를 선택하는 경우 Backdriving 되는 경향이 많습니다.
35% 이하의 효율성을 가진 리드 스크류를 선택하실 경우 이러한 Backdriving을 방지할 수 있습니다. 작은 Lead를 선택하실 수록 Backdriving이나 공회전의 가능성을 최소화 할 수 있습니다.
수직 방향의 시스템에서는 중력 때문에 Backdriving이 더 쉽게 발생 할 수 있습니다.
리드 스크류를 구동하기 위해 요구되는 모터 토크는 아래의 토크들의 합으로 이루어집니다.
표준 미터법 또는 인치식 옵션을 사용할 수 있습니다.
또한 고객 요구 사항에 따라 끝단 가공이 가능하오니, 필요한 경우 딩스로 연락 주시기 바랍니다.
스크류 시스템의 성능 (속도 및 효율성)은 스크류 끝단이 어떻게 부착되고 지원되는지에 영향을 받습니다.
| 끝단 고정 형태 | 관련 강도 | 임계 속도 변수 | 임계 부하 변수 |
|---|---|---|---|
 |
덜 강함 | 0.32 | 0.25 |
 |
강함 | 1.0 | 1.0 |
 |
더 강함 | 1.55 | 2.0 |
 |
가장 강함 | 2.24 | 4.0 |
임계 속도는 스크류의 결함으로 인해 스크류의 회전 속도가 최초 공명 영역에 도달하게 되는 속도를 말합니다. 이 속도 영역에서는 시스템이 진동하고 불안정하게 됩니다.
임계 속도 도달에 영향을 미치는 변수들이 몇 가지 있습니다.
예를 들어, 표에서 19.05mm (0.75인치) 직경 및 1778mm (70인치) 길이의 스크류는 안전 계수 K = 1.25 값을 가지며, FS = 0.32 기준에서의 임계 속도는 187rpm이 됩니다.
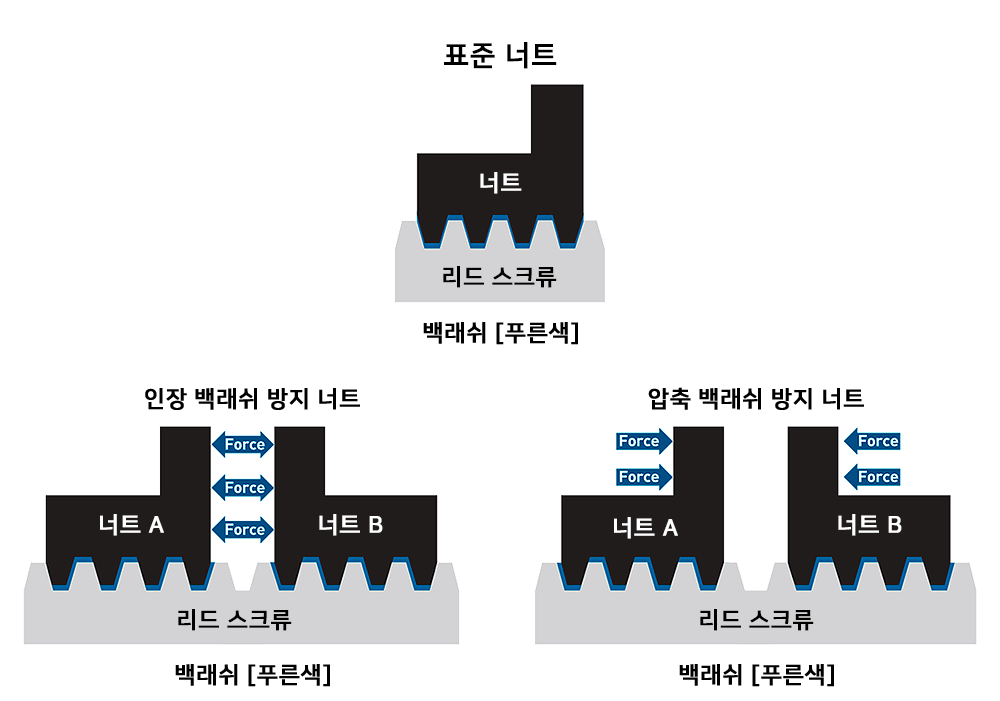
백래쉬는 스크류와 너트 사이의 상대적인 축 방향 이동이라고 할 수 있습니다. 시간이 지남에 따라 백래쉬가 함께 증가하는 것이 정상입니다.
백래쉬의 보상이나 수정은 백래쉬 방지 너트를 사용함으로서 수행될 수 있습니다.
백래쉬는 오로지 양방향 위치에만 관련합니다.